Power Cycles

The AutoPi dongle is initially configured to be powered on when the engine of the vehicle is running. When the engine is not running, a sleep timer is created to put the dongle to sleep after 5 minutes or whatever configured.
Behind the scenes this works by using engine events. Engine events are triggered based on the RPM values continuously read from the vehicle. For all non-BEVs (Battery Electric Vehicles) this is setup automatically as default because they all support readout of engine RPM in the same way according to the OBD-II PID standard (SAE J1979).
Unfortunately, this is not as simple for BEVs. Here there is no standard and data is read out in different ways between makes and models. Two approaches are available:
- if your vehicle can respond to PID requests and/or
- if your car continuously delivers data on a CAN bus.
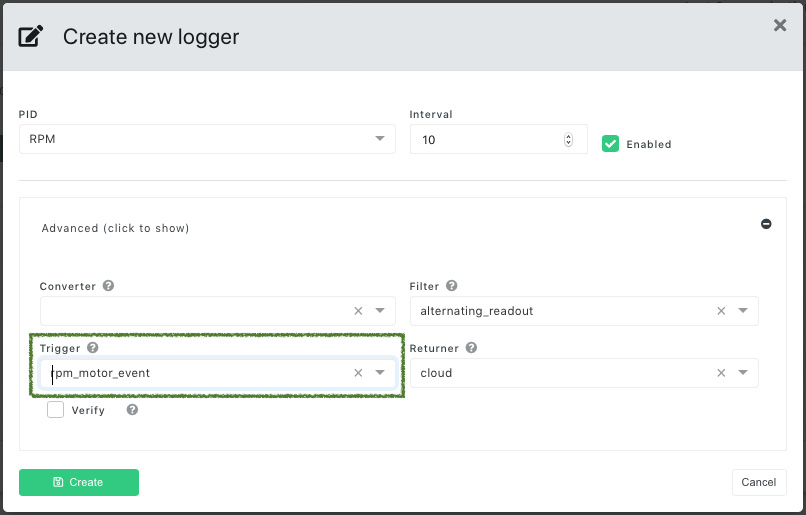
Setup a PID Logger Using the rpm_motor_event Trigger
This option can be used if your vehicle can respond to PID queries.
Precondition: A PID which on request delivers an RPM value related to the movement of the vehicle. It could be the RPM of an electric motor, a spinning wheel etc. If you do not know of such a PID for your model, you can always check the Community Library on https://my.autopi.io.
The PID must be named 'RPM' or else the rpm_motor_event trigger will skip checking the value.
Go to Device > Loggers > Create > PID. Choose your RPM PID and be sure to select the rpm_motor_event trigger.
After the logger has been synced to your device, and the service has been restarted, you should start seeing motor events in the Device > Events page.
Click here for documentation on motor events.
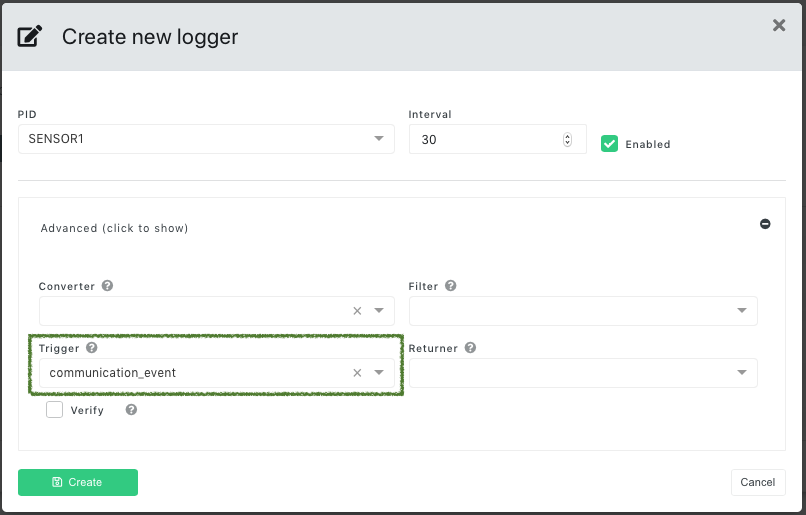
Setup a PID Logger Using the communication_event Trigger
This option can be used if you do not have a PID capable of delivering RPM data, but instead have another arbitrary PID that delivers data when the vehicle is moving or active. The actual content of the PID response is irrelevant for this trigger to function.
Precondition: A PID which on request delivers data when the vehicle is active and no response when the vehicle is inactive. If you do not know any PID to use, you can always check the Community Library on https://my.autopi.io.
Note: There is no restriction on specific naming of the PID.
Go to Device > Loggers > Create > PID. Choose your arbitrary PID and be sure
to select the communication_event trigger.
Click here for documentation on communication events.
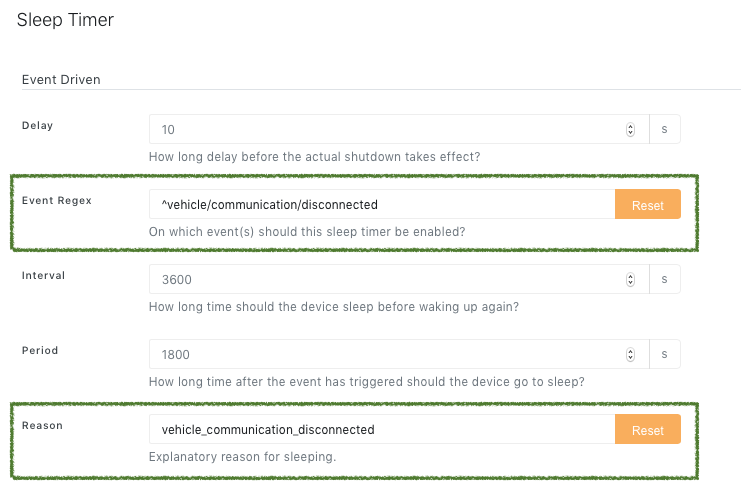
Next step is to re-configure the sleep timer functionality to use communication events instead of the default engine/motor events. Go to Device > Advanced Settings > Power and change the three values:
Sleep Timer > Event Driven > Event Regex: ^vehicle/communication/disconnected
Sleep Timer > Event Driven > Reason: vehicle_communication_disconnected
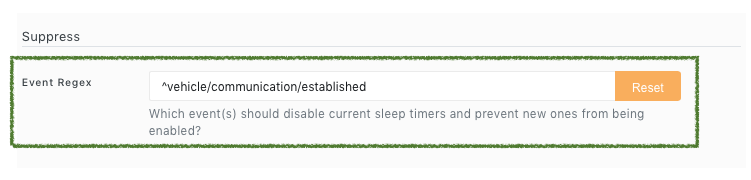
Sleep Timer > Suppress > Event Regex: ^vehicle/communication/established
As shown below:
...
After all the changes have been synced to your device, and the service has been restarted, you
should start seeing communication events and also system/sleep_timer events in the
Device > Events page.
Setup a PID Logger Using a Custom Trigger
Caution: This option is recommended for expert users only.
Instead of using one of the built-in triggers you can provide your own implementation which also can fire your own custom events. The setup procedure is the same as in the example above except that the trigger used is custom. See how to create a custom trigger here.
Setup a CAN Logger Using the rpm_engine_event Trigger
This option can be used if your vehicle continuously produces data on a CAN bus while active/driving.
Note: At the time of writing, this approach can only make use of the rpm_engine_event trigger
and thus produce engine events,
click here for documentation on engine events.
Precondition: A CAN message mapping for your specific vehicle which contains an RPM signal. If you do not know any CAN messages for your vehicle, you can always check the Community Library on https://my.autopi.io.
The following example shows how an RPM signal can be found in the Community Library for vehicles of the make Alfa Romeo. Go to OBD Library > Community Library and specify Make:
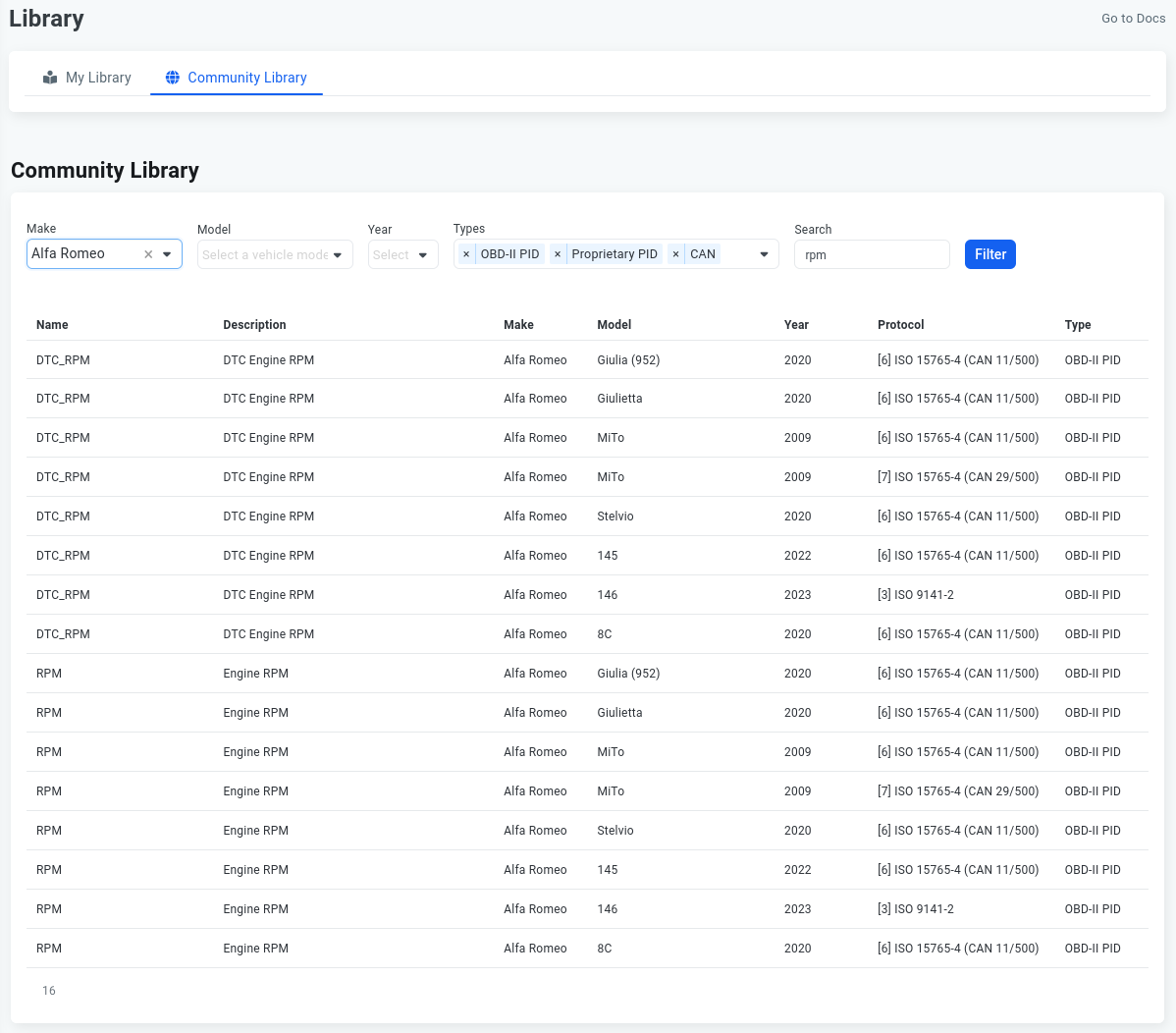
Click on the RPM signal and in the pop-up window click on the button Add to my library. You have now added the CAN message to your library, and you can use it for logging.
Next step is to setup a CAN logger for the RPM signal. Go to Device > Loggers > Create > CAN and choose the RPM signal:
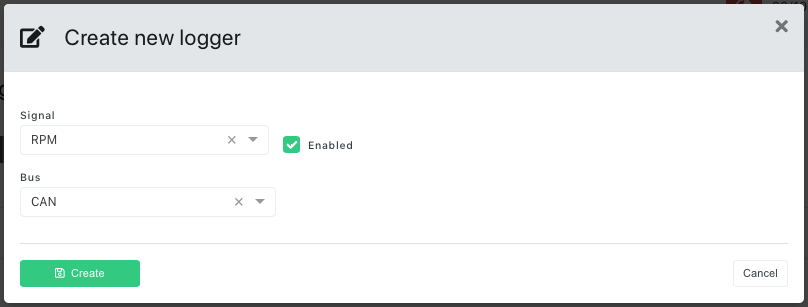
The CAN signal must be named 'RPM' or else the rpm_engine_event trigger will skip checking the
value.
After the logger has been synced to your device, and the service has been restarted, you should start seeing engine events in the Device > Events page.
 Buy AutoPi device
Buy AutoPi device Compare all AutoPi devices
Compare all AutoPi devices Contact our sales team
Contact our sales team